Проектирую робота-доставщика: как уместить драйвер бесколлекторника в 50х100 мм и не сойти с ума
Всем привет!
Я разработчик, люблю проектировать и создавать различные устройства на базе микроконтроллеров. Сейчас плотно сижу над проектом собственного робота-доставщика. Проект амбициозный, и сейчас я жестко завис на этапе проектирования печатной платы для драйвера бесщёточного двигателя (BLDC).
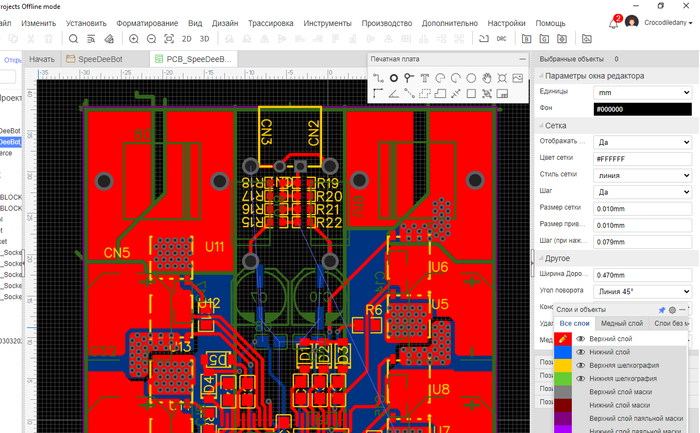
Мой рабочий хаос в EasyEDA. Пытаешься сделать всё по правилам, но габариты диктуют свои условия.
В чем главная боль:
Мне нужно жестко уложиться в стандартные китайские габариты 50х100 мм, чтобы плата не стоила как крыло от самолета. Из-за жесткой экономии места, приходится нарушать примерно всё, что можно нарушить в правильной трассировке силовых дорожек. Силовые линии идут впритирку к сигнальным, но я пытаюсь выжать максимум из этой компоновки. Не настолько я богат, чтобы заказывать произвольные платы нестандартных размеров.
Знакомые давно советовали мне открыть сбор на Пикабу, чтобы ускорить разработку, но я вечно сомневался. Кому это интересно, когда вокруг столько забот и проблем в экономике? Интересно кто прав, знакомые или я?
Железки и разводка плат — это только верхушка айсберга. Проектирование робота с нуля — это вечный поиск компромисса между теорией из учебников и толщиной твоего кошелька. Моторы, компоненты, заказ плат в Китае, недели ожидания... И бесконечное: «Ждать, ждать и снова ждать».
А затем начинается ад с механикой. Мало придумать узел, нужно смоделировать его в 3D и проверить, как всё это шевелится в реальности.
Зацените мой редуктор GT2 (передаточное 2:1) в 3D. Модель полностью рабочая, крутится в софте плавно, без багов и тормозов. Но сколько крови она мне стоила...
Как РКН и баги софта вставляют палки в колёса:
Когда мне понадобилась инфа по сложным сопряжениям деталей, я наткнулся на неожиданное препятствие — «спасибо» РКН. Заблокированный Замедленный YouTube просто отказался грузить обучающие ролики. На отечественных платформах информации крупицы, и все авторы как под копирку повторяют один и тот же базовый алгоритм. Пришлось доходить до всего своим умом и калькулятором.
Когда я создал 3D модель по обучающим роликам, то столкнулся с проблемой. При вращении модель тупо намертво зависала. Программа 3D-моделирования отказывалась адекватно воспринимать геометрию и постоянно спотыкалась. Я бился, может я делаю что-то не так. Оказывается она зависает так у всех. Там баг в алгоритмах, не умеет программа такие передачи отрисовывать. Пришлось писать свой алгоритм сопряжений. И тут начался самый сок. Я сел рассчитывать профиль шкива под редуктор GT2 и сопряжения анимаций. И понял что ...
Казалось бы, ну что такого в обычном редукторе? В итоге, чтобы просто обойти внутренние баги CAD-программы и автоматически рассчитывать любой шкив под мои задачи, мне пришлось написать около 1500 строк кода!
Тот самый кусок кода для автоматического расчёта редукторов и построения траекторий сопряжения. Геометрия из школы наконец-то пригодилась.
На этот код и геометрические расчёты я убил целую неделю. Пришлось экстренно вспоминать синусы, косинусы и прочую школьную тригонометрию. В этот момент я отчетливо осознал: школьная учительница была права, геометрия в жизни реально пригодилась.
Мой друг, глядя на мои мучения, часто говорит: «Да ладно тебе, не бойся ошибаться, это же нормальный процесс разработки!». И я с ним абсолютно согласен. Ошибаться — это нормально. Вот только в моём случае любая ошибка — это прямой и болезненный удар по карману.
Одно дело — ошибиться в коде. Нажал Backspace, переписал, запустил заново. Бесплатно. Совсем другое дело — ошибиться в «железе». Спроектировал корпус, накопил денег, отдал чертежи на стороннее производство. Приезжает готовая деталь, ты радостно садишься за сборку и понимаешь: ось подшипника смещена на полмиллиметра. Или диаметр из-за усадки уплыл. И что делать? Покупать новые подшипники под косячную деталь? Или снова копить деньги и переделывать всё с нуля? Ошибаться — нормально, но накладно.
Именно поэтому я так сильно хочу купить собственный 3D-принтер.
С принтером на столе цена ошибки падает почти до нуля. Накосячил в размерах? Переделал модель, нажал кнопку «Печать» и через два часа у тебя в руках новая тестовая деталь стоимостью в 50 рублей из куска пластика. Ты можешь примерить подшипник, проверить люфты и зазоры прямо здесь и сейчас, не тратя недели на ожидание и тысячи рублей на сторонний заказ.
Порой критически не хватает рук, времени и, конечно же, средств. И если время и руки еще можно как-то оптимизировать, то финансы часто играют решающую роль. Эх, были бы бюджеты — нанял бы целую команду инженеров... Но это пока влажные мечты проектировщика цифровых устройств))
Что ж, с поддержкой или без, я всё равно буду пробиваться. Буду биться до победного, пусть даже иногда это напоминает штурм глухой стены. Я — проектировщик. Могу быть в чем-то неправ, могу косячить, но это у меня в крови с самого детства. Я просто не умею жить по-другому.
Без 3D-принтера, на чистом энтузиазме и сторонних заказах деталей, этот робот-доставщик растянется еще на пару лет. С принтером я рассчитываю поднять его на ноги уже в ближайшие месяцы.
Спасибо огромное всем, кто дочитал эту исповедь до конца. Каждому, кто решит закинуть копеечку в виджет ниже — жму руку. Вы инвестируете не в игрушку, а в реальное железное устройство, которое обязательно попрет вперед.
А пока я возвращаюсь к своей плате 50х100 мм. Жду всех в комментариях, особенно критиков по трассировке — накидайте советов, где я накосячил!